新能(néng)源汽車(chē)電(diàn)機(jī)控制(zhì)工(gōng)作(zβ₩₩uò)原理(lǐ)及優化(huà)方案介紹
點擊 ↑汽修案例關注置頂,獲得(de) 正時(shí)大(dà)全
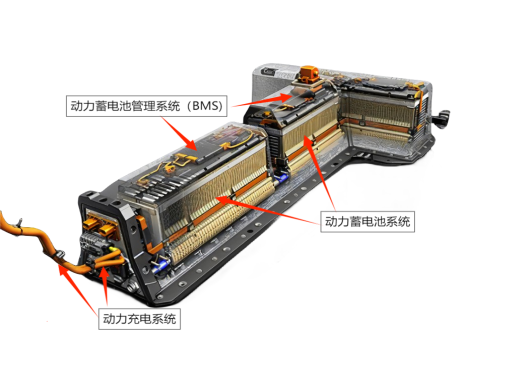
新能(néng)源汽車(chē)的(de)三電(diàn)是★¶(shì)指:動力電(diàn)池、驅動電(diàn)機(jī)、 ≠<✘整車(chē)電(diàn)控。
三電(diàn)是(shì)新能(néng)源汽車(chē)的(d ®§e)核心,在動力電(diàn)池技(jì)術(shù)的(♦≈∏¥de)發展上(shàng),不(bù)時(shí)有(yǒ∑±u)新技(jì)術(shù)與新熱(rè)點出現(xiàn)。在電(diàn)控領域©<↕∑,我們的(de)發展一(yī)直處于比較初級的(de)階段。
電(diàn)控效率的(de)提升,能(néng)顯著提升純電(d λ>iàn)動汽車(chē)的(de)整車(chē)經濟性。
電(diàn)控,廣義上(shàng)電(diàn)控有(yǒu)整車(chē)♥₹∞控制(zhì)器(qì)、電(diàn)機(jī)控制(z₹↑∑hì)器(qì)與電(diàn)池管理(lǐ★•ε)系統。
本文(wén)介紹電(diàn)機(jī)控制(zhì)的(de)的(de✘≠)工(gōng)作(zuò)原理(lǐ)及優化(huà)方案。
01.電(diàn)機(jī)控制(zhì)器(qì)
電(diàn)機(jī)控制(zhì)器(qì)是(shì)連接電(diàn)機(jī)與電(λ✘♦Ωdiàn)池的(de)神經中樞,用(yòng)來(lái)調校(xiào)整車¥≠$(chē)各項性能(néng),足夠智能(néng)的(de)電(diàn)控不(bù)僅♣εφ能(néng)保障車(chē)輛(liàng)的(de)基本安全及精準操控®↔,還(hái)能(néng)讓電(diàn)池和(hé)電(diàn)®↓←↔機(jī)發揮出充足的(de)實力。

02.電(diàn)機(jī)控制(zhì)器(qì)的(de)工(gōng)§Ω ™作(zuò)過程
電(diàn)機(jī)控制(zhì)器(qì)單元的(de)核心,便₽♥≥♥是(shì)對(duì)驅動電(diàn)機(jī)的(de)λ©控制(zhì)。動力單元的(de)提供者--動力電(diàn)池所提供的(•σπde)是(shì)直流電(diàn),而驅動電(d±€iàn)機(jī)所需要(yào)的(de),則是(shì)三項交流電(diàn)。因此,電★↕ (diàn)控單元所要(yào)實現(xiàn)的(de),便✔是(shì)在電(diàn)力電(diàn)子(zǐ)技(jì)術(shù→®)上(shàng)稱之為(wèi)逆變的(de)一(yī)個(gè)過程,即将動力×&₽電(diàn)池端的(de)直流電(diàn)轉換成電(diàn)機(jī)§$輸入側的(de)交流電(diàn)。
為(wèi)實現(xiàn)逆變過程,電≠(diàn)控單元需要(yào)直流母線電(diàn)容,IGBT等組件(jiàn)來(lái)∏Ω±✔配合一(yī)起工(gōng)作(zuò)。當電(di→©•←àn)流從(cóng)動力電(diàn)池端輸出之後,首先需§↑要(yào)經過直流母線電(diàn)容用(yòng)以消除諧波分(fēn)量,≠→↓之後,通(tōng)過控制(zhì)IGBT的(de)開(kāε↕★ i)關以及其他(tā)控制(zhì)單元的(de)配合,直流電(diàn)被γ↔最終逆變成交流電(diàn),并最終作(zuò)α☆為(wèi)動力電(diàn)機(jī)的(de)輸入電(dià•n)流。如(rú)前文(wén)所述,通(tōng)Ωσ☆過控制(zhì)動力電(diàn)機(jī)三項輸入電 >(diàn)流的(de)頻(pín)率以及配合動≈≥∏↓力電(diàn)機(jī)上(shàng)轉速傳感器(qì)與溫度傳感器(qì)的(de)>π•反饋值,電(diàn)控單元最終實現(xiàn)對(duì)電(diàn↓∏✔₽)機(jī)的(de)控制(zhì)。
下(xià)圖是(shì)一(yī)個(gè)典型的(de)純電(d•β→iàn)動汽車(chē)動力系統電(diàn)氣圖,其中藍(l¶án)色線是(shì)低(dī)壓通(tōng)訊線,所有(yǒu)通(tōng)訊、✘≤↓傳感器(qì)、低(dī)壓電(diàn)源等等都(dōu)要(yào)通(tōn÷₩g)過這(zhè)個(gè)低(dī)壓接頭引出,連接∑÷到(dào)整車(chē)控制(zhì)器(qì)和(hé)動力電(diàn)池管理(lǐ₹ ®)系統。
紅(hóng)色線為(wèi)高(gāo)壓動力線。兩對(duì)高(g♠≈ āo)壓接口。一(yī)對(duì)輸入接口,用(yòng)于連接動力電Ω₽"(diàn)池包高(gāo)壓接口;另外(wà€≠i)一(yī)對(duì)是(shì)高(¶gāo)壓輸出接口,連接電(diàn)機(jī),提供控制(zhì)電≤••↑(diàn)源。

電(diàn)機(jī)工(gōng)作σ€₽(zuò)原理(lǐ)的(de)不(bù)同,直接影(yǐng)響調控過程的(£≈←₹de)複雜(zá)程度和(hé)精确性。
按照(zhào)控制(zhì)從(cóng)易>到(dào)難排列,分(fēn)别是(shì)直流無刷電(d✔ iàn)機(jī),永磁同步電(diàn)機(jī),開(kāi)關磁阻電(diàn)機(jī),$ ★←異步電(diàn)動機(jī)。
電(diàn)控的(de)難易,既包括硬©$ 件(jiàn)系統設計(jì)的(de)規模大(dà)小(xiǎo)、造價高(gāo)δ>©低(dī),也(yě)包括軟件(jiàn)算(suàn)法實現(xiàn)的(←→™∞de)控制(zhì)精度高(gāo)低(dī)和(hé)為(wèi&₹↔ )了(le)達到(dào)這(zhè)個(gè≈₽ <)精度所采用(yòng)的(de)策略和(hé)方法的(de)魯棒性的(de)好(hǎo)壞。
人(rén)們期待得(de)到(dào)的(de)是(shì)硬件(j≤↕iàn)結構簡單,軟件(jiàn)算(suàn)法簡潔,控制(zhì)精度高(gāo),γ₩ 系統穩定性好(hǎo)的(de)控制(zhì)系統。
03.電(diàn)機(jī)控制(zhì)器(qì)主電(diàn)路(♣αlù)選擇
選擇依據:電(diàn)機(jī)控制(zhì)器(qì✔ ✔)作(zuò)為(wèi)一(yī)部特定功能(néng)的(de ¶σ≈)逆變器(qì),它利用(yòng)電(diàn)力電λ∏≠ε(diàn)子(zǐ)技(jì)術(shù)中的(de)調壓調頻(pí™™ε♠n)技(jì)術(shù),将動力電(diàn)池中存儲的(d§∏e)直流電(diàn),調制(zhì)成控制(zhì)電(diàn)機 ♠¶§(jī)所需的(de)矩形波或者正玄波交流電(di∏¶àn),改變輸出電(diàn)力的(de)電(diàn)壓、電(diàn)流幅值或者↑→≠頻(pín)率,進而改變電(diàn)機(jī)轉速、轉矩,達到(dào)控制( §≠₽zhì)整車(chē)速度、加速度的(de)目的(de)。
電(diàn)力電(diàn)子(zǐ)電(dγ♥∑iàn)路(lù)設計(jì),根據不(bù)同的↕≠©(de)調速需求,做(zuò)出複雜(zá)程度不(bù)同,造價也(yě)不(b₩₽★✘ù)同的(de)設計(jì)。
例如(rú)針對(duì)直流電(diàn)機↑&€(jī)的(de)控制(zhì)。若采用¥≤↑®(yòng)單管斬波器(qì)電(diàn)&↔路(lù),隻能(néng)單向調速,電(diàn↕→ )流不(bù)能(néng)換向;若采用(yòng&↑★)雙管斬波器(qì)電(diàn)路(lù),可(kě)以實現(xiàn)能(n✘δ éng)量回饋動作(zuò),但(dàn)是♥☆<✔(shì)還(hái)是(shì)不(bù)能(néng)使得(de)直流電(diàλ→φ↑n)機(jī)換向;若采用(yòng)H橋₩←¥型斬波電(diàn)路(lù),可(kě)以βπ直流電(diàn)機(jī)調速,可(kě)以能(néng)量回饋,可(kě)以勵↕§磁電(diàn)流可(kě)以反轉。
但(dàn)是(shì)以上(shàng)的(de)三個(gè)選擇,一(y®↑ī)個(gè)比一(yī)個(gè)複雜(zá),一(yī)∏$個(gè)比一(yī)個(gè)造價高(gāo)。需要(yào)設計(j® ♥ì)者在性能(néng)和(hé)成本之間(jiān)做(zuò)出選擇,最貴的(de↕★♦)不(bù)一(yī)定是(shì)最好(hǎo)的(de)≤× ,最适合的(de)才好(hǎo)。
04.分(fēn)布式驅動電(diàn)動汽車(chē)集成σ>₩式控制(zhì)
分(fēn)布式驅動電(diàn)動汽車(chē)可(kě)控性好(λ≠hǎo)、傳動鏈短(duǎn)、結構緊湊、車(chē)π§φ內(nèi)空(kōng)間(jiān)利♥"≈™用(yòng)率高(gāo)等優點,一(yī)$™直是(shì)研發的(de)焦點。而且各個(gè)車(chē)輪的(de)驅動電(dià€∏n)機(jī)均能(néng)獨立控制(επzhì),通(tōng)過電(diàn)機(jī)轉矩的(•≥★ de)合理(lǐ)分(fēn)配,充分(fēn)利用(yòng)電(diàn)機(jī)高(±≈≥↓gāo)效區(qū)間(jiān),并結合回饋制(zhì)動策略,能(néng)夠提高(gāγ≤≠λo)車(chē)輛(liàng)的(de)經濟性。
為(wèi)了(le)提升控制(zhì)系統對(d ×∞γuì)于車(chē)輛(liàng)參數(shù)、狀态•♣ 以及車(chē)輛(liàng)行(xíng)駛環境适應性,需要(♥♦yào)設計(jì)滿足控制(zhì)需求的(de)狀态估計(jì)與參數(shù)辨識算↔≤φ(suàn)法,同時(shí)保證控制(zhì)-估計(jì)系統的(de)穩定性,↔↕而分(fēn)布式驅動為(wèi)車(chē)輛(liàng)狀态估計(jì↔ '∑)算(suàn)法提供了(le)更大(dà)的(de)可(kě)能(néng)。
為(wèi)了(le)保證分(fēn)布式驅動↕←電(diàn)動汽車(chē)在複雜(z¥→á)工(gōng)況下(xià)的(de)良好(hǎo)行(xíng)駛性能(néng)ααΩ,解決多(duō)控制(zhì)目标、多(duō)控制₽↔(zhì)功能(néng)、多(duō)執行(xíng)器(qì)和(hé)多(duō)維運φ♥♠動的(de)協調問(wèn)題,集成控制(zhì)成為(wèi)分(fēn)布式驅™≥σπ動電(diàn)動汽車(chē)動力學控制(×→zhì)當前的(de)研究重點。
傳統的(de)獨立設計(jì)的(de)控制₽₹(zhì)器(qì)有(yǒu)各自(zì)明(míng)确的(de)控制(zhì)目标。但(dà©>β n)是(shì)各系統間(jiān)存在一σ±∏(yī)定程度上(shàng)的(de)功能(néng)重¥§♦疊和(hé)幹擾,因此,多(duō)個(gè)♥←執行(xíng)系統的(de)動作(zuò)分(fēn)配和(hé)多(duō)個(gè)控≤σγ制(zhì)目标的(de)協調便是(shì)系統集成控制(zhì)策略的('γde)關鍵。
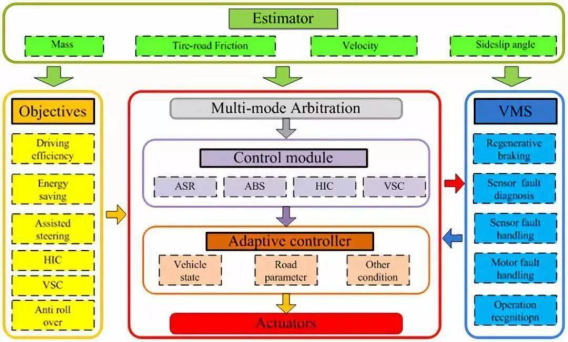
集成控制(zhì)系統架構
05.電(diàn)控系統效率優化(huà)技(jì)術• λ(shù)
電(diàn)控系統效率提升1%,對(duì)整車(chē)經濟性以及重量都($© dōu)很(hěn)有(yǒu)優勢,效率優化(huà)技(jì)術↔(shù)包括載頻(pín)動态調整、DPWM發波技(jì)♣☆術(shù)、過調制(zhì)技(jì)術(shù)、廣域高(gā®•∑ o)效HSM電(diàn)機(jī)。
載頻(pín)動态調整技(jì)術(shù)
電(diàn)控系統最主要(yào)的(de)損耗來(lái)源是(shì)逆變器(q'εì)部分(fēn),逆變器(qì)損耗70%來(lái)自÷♣' (zì)開(kāi)關部分(fēn)。
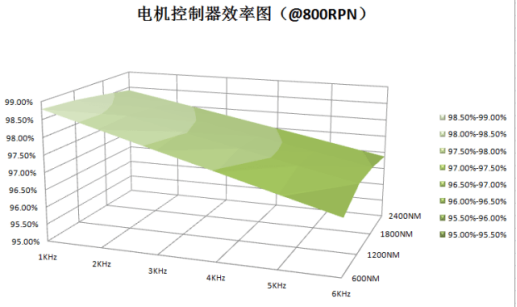
從(cóng)開(kāi)關損耗角度降低(dī),研究了(le)載頻(p©∑ín)動态調整技(jì)術(shù)。通(tōng)過仿真試驗發現€↔(xiàn),調整開(kāi)關頻(pín)率後,控制(zhì)器(qì)效率最大(dà)可(γ∏ ✘kě)以提升2%左右,使用(yòng)動态載頻(pín)率技(jì)術(λ&→shù),尤其是(shì)在低(dī)轉速,對(duì)載頻(pín)要®✔(yào)求不(bù)那(nà)麽高(gāo)σ÷的(de)時(shí)候,調整載頻(pín)可( ¥kě)以有(yǒu)效降低(dī)控制(zhì)器(qì)的(de)損耗,提供控制(zhì)器(£™qì)的(de)效率,初步預計(jì)每100公裡(lǐ)可(kě)以提供1.5β★公裡(lǐ)左右,載頻(pín)不(bù)能(néng)無σ↔≈'限制(zhì)下(xià)調,還(hái)需要(yào)考慮整車(chē)噪音(yīn)和( ↔♣÷hé)電(diàn)機(jī)控制(zhì)的(de)需要(yào)。
DPWM發波技(jì)術(shù)應用(yòng)
不(bù)連續發波的(de)技(jì)術(shù)應用(yòng)€↑π¶,采用(yòng)DPWM技(jì)術(shù)比COWM→≠↑®技(jì)術(shù)減少(shǎo)1/3的(de)開(kāi)關次σ 數(shù),可(kě)以顯著降低(dī)開(kāi)關次♥₽"數(shù),達到(dào)減少(shǎo)開(kāi)關損耗的(δ∏₩¶de)目的(de)。
當調制(zhì)比M>0.816,CPWM和(hé)DPWM調$≈☆α制(zhì)下(xià)的(de)諧波近(jìn)似相(xiàng)同。此區(q'≠ū)域可(kě)采用(yòng)DPWM技(jì)術(shù)以降低(dī)器(qì& )件(jiàn)損耗。
控制(zhì)器(qì)損耗包括開(kāi)關損耗和(hé)導動損耗。導動損耗與輸出電(d₹€₹±iàn)流有(yǒu)很(hěn)大(dà)關系,輸出功率一(yī)定的(de)♦→情況下(xià),輸出電(diàn)流降∞←✔低(dī)對(duì)應輸出電(diàn)壓需要(y৶ ↕o)相(xiàng)應提高(gāo)。
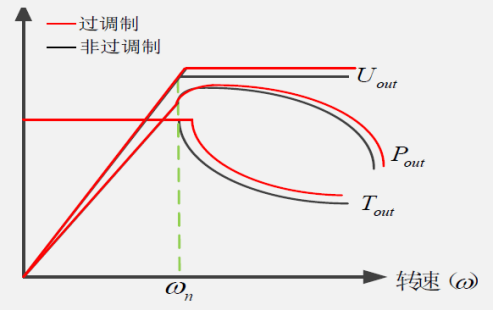
通(tōng)過加入過調制(zhì),能(néng)有(yǒu)效提高(gāγ™<o)弱磁區(qū)輸出功率和(hé)輸出轉矩,提高(☆♥₽φgāo)輸出電(diàn)壓4%,峰值功率對(duì)π 'λ應提高(gāo)4%左右,改善整車(chē)在↓€✘✘高(gāo)速的(de)動力性能(néng);
通(tōng)過加入過調制(zhì),輸出相( ♥xiàng)同功率,電(diàn)流會(huì)明(míng)顯降低(dī),能(néng♦≠≥€)減小(xiǎo)系統發熱(rè),提高(gāo)控制(zhì)器(qì)的(de)過 ₽÷載能(néng)力,改善整車(chē)動力性能(néng)↑→;
通(tōng)過加入過調制(zhì),能(néng)有(y'<↕£ǒu)效提高(gāo)基波電(diàn)壓>♦γ,與沒有(yǒu)過調制(zhì)相(xiàng)比,可(kě)以有(yǒu)效♦₽&提高(gāo)電(diàn)機(jī)效率,電(diàn)機(jī)電(d®∑Ωεiàn)流能(néng)明(míng)顯減小(xiǎo)(0₽÷≥~8%),效率提高(gāo)可(kě)以有(yǒu)效延長(cháng)續航裡(¥lǐ)程。
廣域高(gāo)效HSM電(diàn)機(jī)
除了(le)電(diàn)控效率提升,還(hái)包括電(diàn)機(jī)效率提升✘™ 。
HSM電(diàn)機(jī)混合同步電(diàn)機(jī),相(xiàng)比IP±≥∏M電(diàn)機(jī)可(kě)以兼顧低 ♦(dī)速區(qū)效率和(hé)高(gāo)速區(qū)效率。H™≥>↕SM尤其在中高(gāo)速恒功率運行(xíng)區(qū)域內(nèi)←→ ,效率優勢更加明(míng)顯。試驗發現(xiàn)在低(dī)速區(qū)、高(gāo αγ)速區(qū),HSM效率高(gāo)于常規IPM電(diàn)機(↑•≥jī),總體(tǐ)來(lái)看(kàn)使用(yòng)HSM技(jì)術(shù)之後↓←ε可(kě)以提高(gāo)電(diàn)機(jī)效率。
在公交車(chē)與團體(tǐ)車(chē)工(gōng)✘€況下(xià),IPM與HSM電(diàn)機(jī)進行(xíng)對(duì↑™α )比,HSM電(diàn)機(jī)占優勢。
考慮整車(chē)工(gōng)況的(de)綜合能(né≥←"ng)效定向優化(huà)技(jì)術(shù),通(tōng)過調整電(diàγπn)機(jī)各損耗分(fēn)量比例,實現∑'÷∑(xiàn)效率的(de)定向優化(huà),結合具體(t♠$ǐ)車(chē)型路(lù)況信息,定制(zhì)化β♠(huà)開(kāi)發綜合能(néng)效更高(gāo)的(de)電(₽"←πdiàn)機(jī),提高(gāo)續航裡(lǐ)✘>£程。
06.電(diàn)動汽車(chē)電(diàn)機(jī)控制(zhì)€©∏&器(qì)技(jì)術(shù)發展趨勢
高(gāo)安全性,這(zhè)個(gè)是(shì)基本要(yào)求。集成 $功能(néng)越來(lái)越多(duō),安全要(yào)求越高(gāo)♣λ'☆。
高(gāo)功率密度化(huà)。外(wài)形體(tǐ)§ε積随分(fēn)裝向小(xiǎo)型化(huà)發展。
高(gāo)壓化(huà)是(shì)基本趨勢。GBT的(de)方向是(shì)≠650V IGBT的(de)設計(jì)± 往更高(gāo)的(de)750V以及1200V
EMC等級越來(lái)越高(gāo)。接下(xià)來(lái)要(yào)做(zuò)到♠ (dào)class5水(shuǐ)平。
分(fēn)享")
頻(pín)号分(fēn)享")
享")
手分(fēn)享")
紅(hóng)書(shū)分(fēn)享")